TINKERCAD Giriş Kodları
- tps://www.tinkercad.com/joinclass adresine gidin
- Takma Adı girin.
Arduino Switch-case-break yapısı- Random
Arduino Random

int ranNum;
int ranDel;
void setup() {
// Seed RNG from analog port.
randomSeed(analogRead(0));
// Setup 8 output ports for LED's
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
}
void loop() {
//Generate random number between 8 and 10
ranNum=random(3,11);
// Generate random delay time
ranDel=random(25,300);
//Turn on the LED
digitalWrite(ranNum, HIGH);
delay(ranDel);
//Turn off the LED
digitalWrite(ranNum, LOW);
}
Switch - Case- break

#define led1 13
#define led2 12
#define led3 11
#define led4 10
void setup()
{
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
Serial.begin(9600);
}
void loop()
{
byte sira = random(1,5);
Serial.println(String("Sira : ") + sira);
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
switch(sira){
case 1:
digitalWrite(led1, HIGH);break;
case 2:
digitalWrite(led2, HIGH);break;
case 3:
digitalWrite(led3, HIGH);break;
case 4:
digitalWrite(led4, HIGH);break;
}
delay(1000);
}
--------------------------------------------------------------------------------------------------------------------------
Servo motor - Robot kollar
#include <Servo.h> /* Servo kutuphanesi projeye dahil edildi */
Servo servoNesnesi; /* servo motor nesnesi yaratildi */
void setup()
{
servoNesnesi.attach(9); /* Servo motor 9 numarali pine baglandi */
}
void loop()
{
servoNesnesi.write(100); /* Motorun mili 100. dereceye donuyor */
delay(1000);
servoNesnesi.write(20); /* Motor mili 20. dereceye donuyor */
delay(1000);
}
--------------------------------------------------------------------------------------------------------------------------
Arduino lcd ekran

Önemli 3.3v yerine aşağıdaki gibi direnç ile bağlantılar daha sağlıklı olmaktadır yukarıdaki devrede uzun süre içerisinde yanma ile karşılaşılabilir.

#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 7, 6, 5, 4, 3);
void setup() {
lcd.begin(16, 2);
lcd.print("hello, world!");
}
void loop() {
}
--------------------------------------------------------------------------------------------------------------------------Arduino lcd ekran milis kodu
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 7, 6, 5, 4, 3);
void setup() {
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
// Print a message to the LCD.
lcd.print("hello, world!");
}
void loop() {
lcd.setCursor(0, 1);
lcd.print(millis() / 1000);
}
---------------------------------------------------------------------------------------------------------------------
Arduino lcd ekran for kodu saydırma
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 7, 6, 5, 4, 3);
void setup() {
lcd.begin(16, 2);
for(int a=1; a<100;a++){
lcd.print(a);
delay(100);
lcd.clear();
}
}
void loop() {
}
Soru 1: Çift sayıları yazdırınız.
Soru 2: 1+2+3+4+5=15 ekran çıktısını yapınız
Soru 3: 1 ile 100 arasında rastgele sayı yazsın
--------------------------------------------------------------------------------------------------------------------------
Ultrasonik sensör

int trigPin = 6; /* Sensorun trig pini Arduinonun 6 numaralı ayağına bağlandı */
int echoPin = 7; /* Sensorun echo pini Arduinonun 7 numaralı ayağına bağlandı */
long sure;
long uzaklik;
void setup(){
pinMode(trigPin, OUTPUT); /* trig pini çıkış olarak ayarlandı */
pinMode(echoPin,INPUT); /* echo pini giriş olarak ayarlandı */
Serial.begin(9600); /* Seri haberlesme baslatildi */
}
void loop()
{
digitalWrite(trigPin, LOW); /* sensör pasif hale getirildi */
delayMicroseconds(5);
digitalWrite(trigPin, HIGH); /* Sensore ses dalgasının üretmesi için emir verildi */
delayMicroseconds(10);
digitalWrite(trigPin, LOW); /* Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi */
sure = pulseIn(echoPin, HIGH); /* ses dalgasının geri dönmesi için geçen sure ölçülüyor */
uzaklik= sure /29.1/2; /* ölçülen sure uzaklığa çevriliyor */
Serial.print("Uzaklik ");
Serial.print(uzaklik); /* hesaplanan uzaklık bilgisayara aktarılıyor */
Serial.println(" CM olarak olculmustur.");
delay(500);
}
TINKERCAD ULTRASONİK SENSÖR KODLARI
const int sinyal = 7;
void setup() {
Serial.begin(9600);
}
void loop() {
long sure, cm;
pinMode(sinyal, OUTPUT);
digitalWrite(sinyal, LOW);
delayMicroseconds(2);
digitalWrite(sinyal, HIGH);
delayMicroseconds(5);
digitalWrite(sinyal, LOW);
pinMode(sinyal, INPUT);
sure = pulseIn(sinyal, HIGH);
cm = sure / 29 / 2;
Serial.print("uzaklik: ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(100);
}
Veri tipleri değer aralıkları
Java Tipi | class | Uzunluk (Byte) | Değer Aralığı |
byte | Byte | 1 byte | 0 … 255 |
short | Short | 2 byte | -32 768 … 32 767 |
int | Integer | 4 byte | -2 147 483 648 … 2 147 483 648 |
long | Long | 8 byte | -263 … 263 - 1 |
--------------------------------------------------------------------------------------------------------------------------
TINKERCAD Park Sensörü Uygulaması

const int sinyal = 7;
int buzzer = 8;
void setup() {
Serial.begin(9600);
pinMode(8, OUTPUT);
}
void loop() {
long sure, cm;
pinMode(sinyal, OUTPUT);
digitalWrite(sinyal, LOW);
delayMicroseconds(2);
digitalWrite(sinyal, HIGH);
delayMicroseconds(5);
digitalWrite(sinyal, LOW);
pinMode(sinyal, INPUT);
sure = pulseIn(sinyal, HIGH);
cm = sure / 29 / 2;
Serial.print("uzaklik: ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(100);
if(cm <= 60){
tone(buzzer, 392);
delay(1000);
noTone(buzzer);
delay(1000);
}
if(cm <= 50){
tone(buzzer, 392);
delay(500);
noTone(buzzer);
delay(500);
}
if(cm <= 40){
tone(buzzer, 392);
delay(10);
noTone(buzzer);
delay(10);
}
}
--------------------------------------------------------------------------------------------------------------------------
TINKERCAD LCD EKRAN UZAKLIK YAZDIRMA
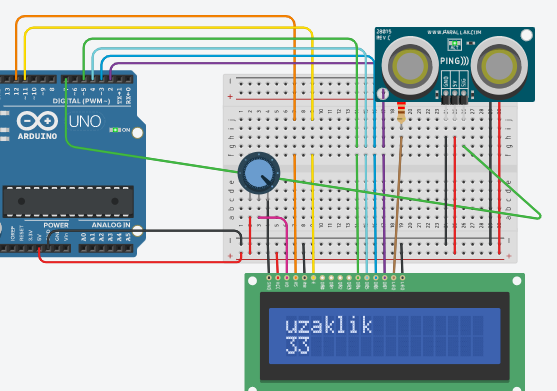
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
const int sinyal = 7;
void setup() {
lcd.begin(16, 2);
lcd.print("uzaklik");
}
void loop() {
long sure, cm;
pinMode(sinyal, OUTPUT);
digitalWrite(sinyal, LOW);
delayMicroseconds(2);
digitalWrite(sinyal, HIGH);
delayMicroseconds(5);
digitalWrite(sinyal, LOW);
pinMode(sinyal, INPUT);
sure = pulseIn(sinyal, HIGH);
cm = sure / 29 / 2;
lcd.setCursor(0, 1);
lcd.print(cm);
}
--------------------------------------------------------------------------------------------------------------------------
ARDUİNO LCD EKRAN SICAKLIK YAZMA

#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
void setup() {
lcd.begin(16, 2);
}
void loop() {
int oku = analogRead(A0);
float gerilim = oku * 5.0;
gerilim /= 1024.0;
float c = (gerilim - 0.5) * 100 ;
lcd.print(c);
delay(1000);
lcd.clear();
}
--------------------------------------------------------------------------------------------------------------------------
C# arayüz ekranı tanıtım
--------------------------------------------------------------------------------------------------------------------------
C# pizzacı uygulaması
--------------------------------------------------------------------------------------------------------------------------
C# arduino veri gönderme
--------------------------------------------------------------------------------------------------------------------------
Çizgi izleyen robot tanıtım devre-kodlar-mantık
--------------------------------------------------------------------------------------------------------------------------
Hiç yorum yok:
Yorum Gönder